OASYS: real-time object detection
OASYS is a survey-grade point-cloud data acquisition, processing and visualisation package developed with the goal of optimising time-critical operations by implementing automatic object detection capabilities.
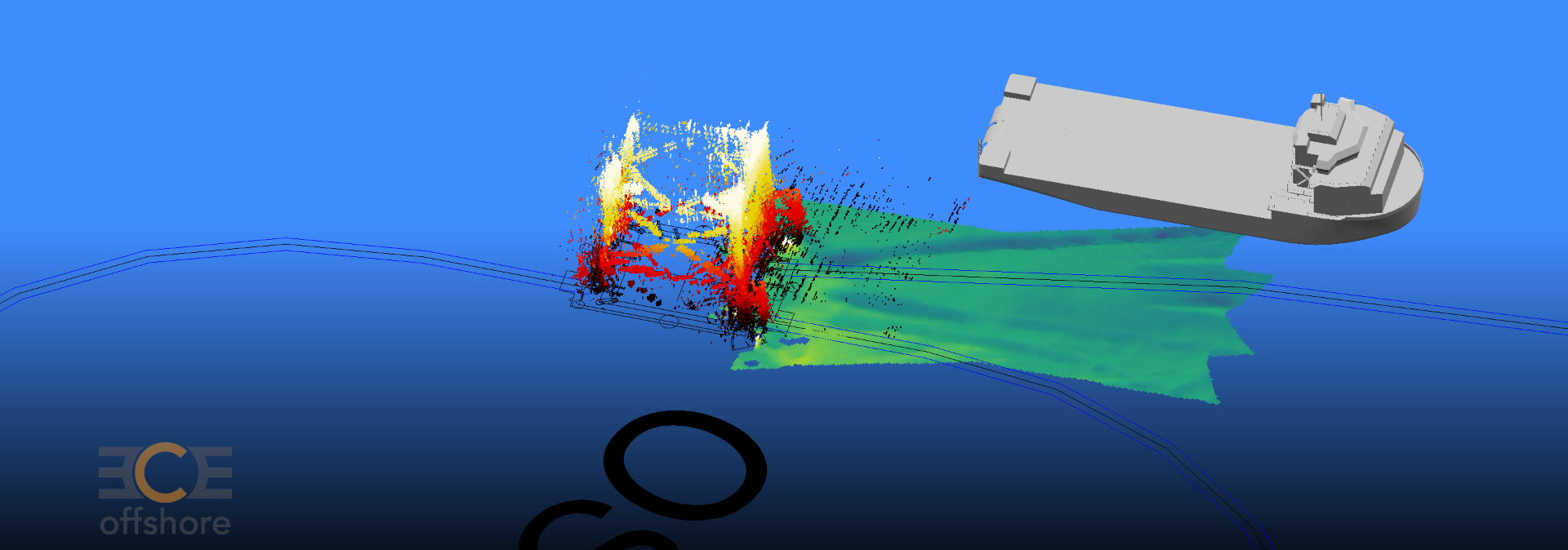
The OASYS software suite is a user-friendly web-based survey environment capable of rendering high-density point cloud and meshed data. On the background, powerful filters and detection algorithms process bathymetry, water column or LIDAR data.
Key features:
- 2D or 3D object detection capabilties
- Replay operations: all data is stored in a database and can be replayed for operational excellence, training or quality control
- Easy to use web-based user interface
- Supports both LIDAR and sonar data

long range & high-resolution
SONAR DATA ACQUISTION
Accurate object positioning requires high-resolution data. OASYS uses 2D multibeam echosounders (MBES) with a large swath width (10° to 160°), sounding depth and resolution (0.45° x 0.9° at 450kHz) in order to obtain sufficient data quality at slant ranges of 30-100m.
The 2D MBES is mounted on our in-house developed pan-tilt rotator equipped with high-accuracy (0.001°) rotational encoders continuously tilts the 2D MBES swath in the third dimension.
high-resolution
LIDAR DATA ACQUISITION
OASYS supports a wide range of LIDAR sensors, originating from both the survey industry as well as the automotive industry. Point cloud data generated by the LIDAR sensors is processed and visualised in realtime.


Automatic quadrant detection during second-end pull-in operations
automatic
OBJECT DETECTION
The core of OASYS are capabilities to perform object detection directly on acquired data. Bespoke filters and algorithms analyse incoming data instantly and detect pre-specified objects. The following operation-specific applications are available:
• OASYS Cable: vessel-fixed cable touchdown & integrity monitoring
• OASYS Pipe: realtime pipelay monitoring from an (autonomous) survey vessel
• OASYS Object: tracks objects on the seabed or water column (e.g. ploughs, mattresses, quadrants)
• OASYS LIDAR: departure angle measurement, local position referencing and monopile inclination monitoring
![]()
ECE Offshore is ISO 9001:2015 certified